Un actuador corresponde a cualquier mecanismo que permita al efector
ejecutar una acción.
Los actuadores robóticos son motores
eléctricos, cilindros neumáticos y cilindros hidráulicos.
Las propiedadesmás importantes que se
deben considerar al implementar actuadores son:
- Potencia.
- Control
- Peso y volumen.
- Precisión
- Velocidad
- Costo y mantenimiento
Los motores generan el movimiento del
robot según las órdenes dadas por la unidad de control.
- NEUMATICOS
En ellos la fuente de energía es aire a presión entre 5 y 10 bar. Existen dos tipos de actuadores neumáticos:
Consiste en el desplazamiento de un émbolo encerrado en un cilindro como consecuencia de la diferencia de presión a ambos lados. Los cilindros neumáticos pueden ser de simple o de doble efecto. En los primeros, el émbolo se desplaza en un sentido como resultado del empuje ejercido por el aire a presión, mientras que en el otro sentido se desplaza como consecuencia del efecto de un muelle.

En los cilindros de doble efecto el aire a presión es el encargado de empujar al émbolo en las dos direcciones, al poder ser introducido de forma arbitraria en cualquiera de las dos cámaras.
En los motores neumáticos se consigue el movimiento de rotación de un eje mediante aire a presión. Los dos tipos más utilizados son los motores de aletas rotativas y los motores de pistones axiales.
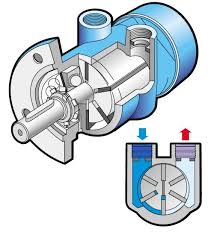
Los motores de pistones axiales tienen un eje de giro solidario a un tambor que se ve obligado a girar ente las fuerzas que ejercen varios cilindros, que se apoyan sobre un plano inclinado. Otro método común más sencillo de obtener movimientos de rotación a partir de actuadores neumáticos, se basa en el empleo de cilindros cuyo émbolo se encuentra acoplado a un sistema de piñón-cremallera.
En general y debido a la compresibilidad del aire, los actuadores neumáticos no consiguen una buena precisión de posicionamiento. Sin embargo, su sencillez y robustez hacen adecuado su uso en aquellos casos en los que sea suficiente un posicionamiento en dos situaciones diferentes. Por ejemplo, son utilizados en manipuladores sencillos, en apertura y cierre de pinzas o en determinadas articulaciones de algún robot
Siempre debe tenerse en cuenta que el empleo de un robot con algún tipo de accionamiento neumático deberá disponer de una instalación de aire comprimido, incluyendo: compresor, sistema de distribución, filtros, secadores, etc.
- Cilindros
Consiste en el desplazamiento de un émbolo encerrado en un cilindro como consecuencia de la diferencia de presión a ambos lados. Los cilindros neumáticos pueden ser de simple o de doble efecto. En los primeros, el émbolo se desplaza en un sentido como resultado del empuje ejercido por el aire a presión, mientras que en el otro sentido se desplaza como consecuencia del efecto de un muelle.
En los cilindros de doble efecto el aire a presión es el encargado de empujar al émbolo en las dos direcciones, al poder ser introducido de forma arbitraria en cualquiera de las dos cámaras.
- Motores neumáticos
En los motores neumáticos se consigue el movimiento de rotación de un eje mediante aire a presión. Los dos tipos más utilizados son los motores de aletas rotativas y los motores de pistones axiales.
Los motores de pistones axiales tienen un eje de giro solidario a un tambor que se ve obligado a girar ente las fuerzas que ejercen varios cilindros, que se apoyan sobre un plano inclinado. Otro método común más sencillo de obtener movimientos de rotación a partir de actuadores neumáticos, se basa en el empleo de cilindros cuyo émbolo se encuentra acoplado a un sistema de piñón-cremallera.
En general y debido a la compresibilidad del aire, los actuadores neumáticos no consiguen una buena precisión de posicionamiento. Sin embargo, su sencillez y robustez hacen adecuado su uso en aquellos casos en los que sea suficiente un posicionamiento en dos situaciones diferentes. Por ejemplo, son utilizados en manipuladores sencillos, en apertura y cierre de pinzas o en determinadas articulaciones de algún robot
Siempre debe tenerse en cuenta que el empleo de un robot con algún tipo de accionamiento neumático deberá disponer de una instalación de aire comprimido, incluyendo: compresor, sistema de distribución, filtros, secadores, etc.
- HIDRÁULICOS
Este tipo de actuadores no se diferencia mucho de los neumáticos. En ellos, en lugar de aire se utilizan aceites minerales a una presión comprendida normalmente entre los 50 y 100 bar, llegándose en ocasiones a superar los 300 bar.

Existen, como en el caso de los neumáticos, actuadores del tipo cilindro y del tipo motores de aletas y pistones.
Sin embargo, las características del fluido utilizado en los actuadores hidráulicos marcan ciertas diferencias con los neumáticos. En primer lugar, el grado de compresibilidad de los aceites usados es considerablemente menor al del aire, por lo que la precisión obtenida en este caso es mayor. Por motivos similares, es más fácil en ellos realizar un control continuo, pudiendo posicionar su eje en todo un intervalo de valores con notable precisión.
Este tipo de actuadores presenta estabilidad frente a cargas estáticas. Esto indica que el actuador es capaz de soportar cargas, como el peso o una presión ejercida sobre una superficie, sin aporte de energía. También es destacable su elevada capacidad de carga y relación potencia-peso, así como sus características de auto lubricación y robustez.
Frente a estas ventajas existen ciertos inconvenientes. Por ejemplo, las elevadas presiones a las que se trabaja propician la existencia de fugas de aceite a lo largo de la instalación. Asimismo, esta instalación es más complicada que la necesaria para los actuadores neumáticos y mucho más que para los eléctricos, necesitando de equipos de filtrado de partículas, eliminación de aire, sistemas de refrigeración y unidades de control de distribución.
Los accionamientos hidráulicos se usan con frecuencia en aquellos robots que deben manejar grandes cargas de 70 a 205kg.
Existen, como en el caso de los neumáticos, actuadores del tipo cilindro y del tipo motores de aletas y pistones.
Sin embargo, las características del fluido utilizado en los actuadores hidráulicos marcan ciertas diferencias con los neumáticos. En primer lugar, el grado de compresibilidad de los aceites usados es considerablemente menor al del aire, por lo que la precisión obtenida en este caso es mayor. Por motivos similares, es más fácil en ellos realizar un control continuo, pudiendo posicionar su eje en todo un intervalo de valores con notable precisión.
Este tipo de actuadores presenta estabilidad frente a cargas estáticas. Esto indica que el actuador es capaz de soportar cargas, como el peso o una presión ejercida sobre una superficie, sin aporte de energía. También es destacable su elevada capacidad de carga y relación potencia-peso, así como sus características de auto lubricación y robustez.
Frente a estas ventajas existen ciertos inconvenientes. Por ejemplo, las elevadas presiones a las que se trabaja propician la existencia de fugas de aceite a lo largo de la instalación. Asimismo, esta instalación es más complicada que la necesaria para los actuadores neumáticos y mucho más que para los eléctricos, necesitando de equipos de filtrado de partículas, eliminación de aire, sistemas de refrigeración y unidades de control de distribución.
Los accionamientos hidráulicos se usan con frecuencia en aquellos robots que deben manejar grandes cargas de 70 a 205kg.
- ELÉCTRICOS
Las
características de control, sencillez y precisión de los accionamientos
eléctricos han hecho que sean los más usados en los robots industriales
actuales.
Dentro de los actuadores eléctricos pueden distinguirse tres tipos diferentes:

Son los más usados en la actualidad debido a
su facilidad de control. En este caso, se utiliza en el propio motor un sensor
de posición (Encoder) para poder realizar su control.
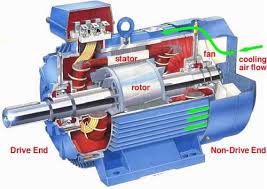
Los motores de DC están constituidos por dos devanados internos, inductor e inducido, que se alimentan con corriente continua:
El inductor, también denominado devanado de excitación, está situado en el estator y crea un campo magnético de dirección fija,
El inducido, situado en el rotor, hace girar al mismo debido a la fuerza de Lorentz que aparece como combinación de la corriente circulante por él y del campo magnético de excitación. Recibe la corriente del exterior a través del colector de delgas, en el que se apoyan unas escobillas de grafito.
Al aumentar la tensión del inducido aumenta la velocidad de la máquina. Si el motor está alimentado a tensión constante, se puede aumentar la velocidad disminuyendo el flujo de excitación.
Para mejorar el comportamiento de este tipo de motores, el campo de excitación se genera mediante imanes permanentes, con lo que se evitan fluctuaciones del mismo. Estos imanes son de aleaciones especiales como sumario-cobalto. Además, para disminuir la inercia que poseería un rotor bobinado, que es el inducido, se construye éste mediante una serie de espiras serigrafiadas en un disco plano, este tipo de rotor no posee apenas masa térmica, lo que aumenta los problemas de calentamiento por sobrecarga.
Las velocidades de rotación que se consiguen con estos motores son del orden de 1000 a 3000 rpm con un comportamiento muy lineal y bajas constantes de tiempo. Las potencias que pueden manejar pueden llegar a los 10KW.
Como se ha indicado, los motores DC son controlados mediante referencias de velocidad. Éstas normalmente son seguidas mediante un bucle de retroalimentación de velocidad analógica que se cierra mediante una electrónica específica. Se denominan entonces servomotores.
Sobre este bucle de velocidad se coloca otro de posición, en el que las referencias son generadas por la unidad de control (microprocesador) sobre la base del error entre la posición deseada y la real.
El motor de corriente continua presenta el inconveniente del obligado mantenimiento de las escobillas. Por otra parte, no es posible mantener el par con el rotor parado más de unos segundos, debido a los calentamientos que se producen en el colector.
Para evitar estos problemas, se han desarrollado en los últimos años motores sin escobillas. En estos, los imanes de excitación se sitúan en el rotor y el devanado de inducido en el estator, con lo que es posible convertir la corriente mediante interruptores estáticos, que reciben la señal de conmutación a través de un detector de posición del rotor.
Los motores paso a paso generalmente no han sido considerados dentro de los accionamientos industriales, debido principalmente a que los pares para los que estaban disponibles eran muy pequeños y los pasos entre posiciones consecutivas eran grandes.
En los últimos años se han mejorado notablemente sus características técnicas, especialmente en lo relativo a su control, lo que ha permitido fabricar motores paso a paso capaces de desarrollar pares suficientes en pequeños pasos para su uso como accionamientos industriales.
Existen tres tipos de motores paso a paso:
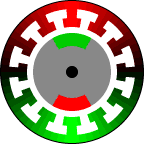
 En
los motores de reluctancia variable,
el rotor está formado por un material ferro-magnético que tiende a orientarse
de modo que facilite el camino de las líneas de fuerza del campo magnético
generado por las bobinas de estator. No contiene, por tanto, imanes
permanentes. El estator es similar a un motor DC de escobillas.
En
los motores de reluctancia variable,
el rotor está formado por un material ferro-magnético que tiende a orientarse
de modo que facilite el camino de las líneas de fuerza del campo magnético
generado por las bobinas de estator. No contiene, por tanto, imanes
permanentes. El estator es similar a un motor DC de escobillas.
La reluctancia de un circuito magnético es el equivalente magnético a la resistencia de un circuito eléctrico. La reluctancia del circuito disminuye cuando el rotor se alinea con el polo del estator. Cuando el rotor está en línea con el estator el hueco entre el rotor y el estator es muy pequeño. En este momento la reluctancia está al mínimo.
La inductancia del bobinado también varía cuando el rotor gira. Cuando el rotor está fuera de alineación, la inductancia es muy baja, y la corriente aumentará rápidamente. Cuando el rotor se alinea con el estator, la inductancia será muy grande. Esta es una de las dificultades del manejo de un motor de reluctancia variable.
Los motores híbridos combinan el modo de funcionamiento de los dos anteriores.
En los motores paso a paso la señal de control consiste en trenes de pulsos que van actuando rotativamente sobre una serie de electroimanes dispuestos en el estator. Por cada pulso recibido, el rotor del motor gira un determinado número discreto de grados. Para conseguir el giro del rotor en un determinado número de grados, las bobinas del estator deben ser excitadas secuencialmente a una frecuencia que determina la velocidad de giro. Las inercias propias del arranque y parada (aumentadas por las fuerzas magnéticas en equilibrio que se dan cuando está parado) impiden que el rotor alcance la velocidad nominal instantáneamente, por lo que ésa, y por tanto la frecuencia de los pulsos que la fija, debe ser aumentada progresivamente.
Para simplificar el control de estos motores existen circuitos especializados que a partir de tres señales (tren de pulsos, sentido de giro e inhibición) generan, a través de una etapa lógica, las secuencias de pulsos que un circuito de conmutación distribuye a cada fase.
A continuación se muestran las configuraciones bipolar y unipolar respectivamente:
Este
tipo de motores no ha tenido aplicación en robótica hasta hace unos años,
debido fundamentalmente a la dificultad de su control. Sin embargo, las mejoras
que se han introducido en las maquinas síncronas hacen que se presenten como un
claro competidor de los motores de corriente continua.
Existen dos tipos fundamentales de motores de corriente alterna:
· Motores asíncronos de inducción
 Son probablemente los más sencillos y
robustos de los motores eléctricos. El rotor está constituido por varias
barras conductoras dispuestas paralelamente el eje del motor y por dos
anillos conductores en los extremos. El conjunto es similar a una jaula de
ardilla y por eso se le denomina también motor de jaula de ardilla. El estator
consta de un conjunto de bobinas, de modo que cuando la corriente alterna
trifásica las atraviesa, se forma un campo magnético rotatorio en las
proximidades del estator. Esto induce corriente en el rotor, que crea su propio
campo magnético. La interacción entre ambos campos produce un par en el rotor.
No existe conexión eléctrica directa entre estator y rotor.
Son probablemente los más sencillos y
robustos de los motores eléctricos. El rotor está constituido por varias
barras conductoras dispuestas paralelamente el eje del motor y por dos
anillos conductores en los extremos. El conjunto es similar a una jaula de
ardilla y por eso se le denomina también motor de jaula de ardilla. El estator
consta de un conjunto de bobinas, de modo que cuando la corriente alterna
trifásica las atraviesa, se forma un campo magnético rotatorio en las
proximidades del estator. Esto induce corriente en el rotor, que crea su propio
campo magnético. La interacción entre ambos campos produce un par en el rotor.
No existe conexión eléctrica directa entre estator y rotor.
La frecuencia de la corriente alterna de la alimentación determina la velocidad a la cual rota el campo magnético del estator. El rotor sigue a este campo, girando más despacio.
· Motores síncronos
 El motor síncrono, como su nombre indica,
opera exactamente a la misma velocidad que le campo del estator, sin
deslizamiento.
El motor síncrono, como su nombre indica,
opera exactamente a la misma velocidad que le campo del estator, sin
deslizamiento.
El inducido se sitúa en el rotor, que tiene polaridad constante (imanes permanentes o bobinas), mientras que el inductor situado en el estator, está formado por tres devanados iguales desfasados 120° eléctricos y se alimenta con un sistema trifásico de tensiones. Es preciso resaltar la similitud existente entre este esquema de funcionamiento y el del motor sin escobillas.
En los motores síncronos la velocidad de giro depende únicamente de la frecuencia de la tensión que alimenta el inducido. Para poder variar esta precisión, el control de velocidad se realiza mediante un convertidor de frecuencia. Para evitar el riesgo de pérdida de sincronismo se utiliza un sensor de posición continuo que detecta la posición del rotor y permite mantener en todo momento el ángulo que forman los campos del estator y rotor.
En la actualidad diversos robots industriales emplean este tipo de accionamientos con notables ventajas frente a los motores de corriente continua.
En el caso de los motores asíncronos, no se ha conseguido resolver satisfactoriamente los problemas de control que presentan. Esto ha hecho que hasta el momento no tengan aplicación en robótica.
Dentro de los actuadores eléctricos pueden distinguirse tres tipos diferentes:
- Motores de corriente continúa. Servomotores
Los motores de DC están constituidos por dos devanados internos, inductor e inducido, que se alimentan con corriente continua:
El inductor, también denominado devanado de excitación, está situado en el estator y crea un campo magnético de dirección fija,
El inducido, situado en el rotor, hace girar al mismo debido a la fuerza de Lorentz que aparece como combinación de la corriente circulante por él y del campo magnético de excitación. Recibe la corriente del exterior a través del colector de delgas, en el que se apoyan unas escobillas de grafito.
Al aumentar la tensión del inducido aumenta la velocidad de la máquina. Si el motor está alimentado a tensión constante, se puede aumentar la velocidad disminuyendo el flujo de excitación.
Para mejorar el comportamiento de este tipo de motores, el campo de excitación se genera mediante imanes permanentes, con lo que se evitan fluctuaciones del mismo. Estos imanes son de aleaciones especiales como sumario-cobalto. Además, para disminuir la inercia que poseería un rotor bobinado, que es el inducido, se construye éste mediante una serie de espiras serigrafiadas en un disco plano, este tipo de rotor no posee apenas masa térmica, lo que aumenta los problemas de calentamiento por sobrecarga.
Las velocidades de rotación que se consiguen con estos motores son del orden de 1000 a 3000 rpm con un comportamiento muy lineal y bajas constantes de tiempo. Las potencias que pueden manejar pueden llegar a los 10KW.
Como se ha indicado, los motores DC son controlados mediante referencias de velocidad. Éstas normalmente son seguidas mediante un bucle de retroalimentación de velocidad analógica que se cierra mediante una electrónica específica. Se denominan entonces servomotores.
Sobre este bucle de velocidad se coloca otro de posición, en el que las referencias son generadas por la unidad de control (microprocesador) sobre la base del error entre la posición deseada y la real.
El motor de corriente continua presenta el inconveniente del obligado mantenimiento de las escobillas. Por otra parte, no es posible mantener el par con el rotor parado más de unos segundos, debido a los calentamientos que se producen en el colector.
Para evitar estos problemas, se han desarrollado en los últimos años motores sin escobillas. En estos, los imanes de excitación se sitúan en el rotor y el devanado de inducido en el estator, con lo que es posible convertir la corriente mediante interruptores estáticos, que reciben la señal de conmutación a través de un detector de posición del rotor.
- Motores paso a paso
Los motores paso a paso generalmente no han sido considerados dentro de los accionamientos industriales, debido principalmente a que los pares para los que estaban disponibles eran muy pequeños y los pasos entre posiciones consecutivas eran grandes.
En los últimos años se han mejorado notablemente sus características técnicas, especialmente en lo relativo a su control, lo que ha permitido fabricar motores paso a paso capaces de desarrollar pares suficientes en pequeños pasos para su uso como accionamientos industriales.
Existen tres tipos de motores paso a paso:
De imanes permanentes
En
los de imanes permanentes, el rotor, que posee una polarización magnética
constante, gira para orientar sus polos de acuerdo al campo magnético creado
por las fases del estator.
De reluctancia variable
 En
los motores de reluctancia variable,
el rotor está formado por un material ferro-magnético que tiende a orientarse
de modo que facilite el camino de las líneas de fuerza del campo magnético
generado por las bobinas de estator. No contiene, por tanto, imanes
permanentes. El estator es similar a un motor DC de escobillas.
En
los motores de reluctancia variable,
el rotor está formado por un material ferro-magnético que tiende a orientarse
de modo que facilite el camino de las líneas de fuerza del campo magnético
generado por las bobinas de estator. No contiene, por tanto, imanes
permanentes. El estator es similar a un motor DC de escobillas. La reluctancia de un circuito magnético es el equivalente magnético a la resistencia de un circuito eléctrico. La reluctancia del circuito disminuye cuando el rotor se alinea con el polo del estator. Cuando el rotor está en línea con el estator el hueco entre el rotor y el estator es muy pequeño. En este momento la reluctancia está al mínimo.
La inductancia del bobinado también varía cuando el rotor gira. Cuando el rotor está fuera de alineación, la inductancia es muy baja, y la corriente aumentará rápidamente. Cuando el rotor se alinea con el estator, la inductancia será muy grande. Esta es una de las dificultades del manejo de un motor de reluctancia variable.
- Híbridos.
Los motores híbridos combinan el modo de funcionamiento de los dos anteriores.
En los motores paso a paso la señal de control consiste en trenes de pulsos que van actuando rotativamente sobre una serie de electroimanes dispuestos en el estator. Por cada pulso recibido, el rotor del motor gira un determinado número discreto de grados. Para conseguir el giro del rotor en un determinado número de grados, las bobinas del estator deben ser excitadas secuencialmente a una frecuencia que determina la velocidad de giro. Las inercias propias del arranque y parada (aumentadas por las fuerzas magnéticas en equilibrio que se dan cuando está parado) impiden que el rotor alcance la velocidad nominal instantáneamente, por lo que ésa, y por tanto la frecuencia de los pulsos que la fija, debe ser aumentada progresivamente.
Para simplificar el control de estos motores existen circuitos especializados que a partir de tres señales (tren de pulsos, sentido de giro e inhibición) generan, a través de una etapa lógica, las secuencias de pulsos que un circuito de conmutación distribuye a cada fase.
A continuación se muestran las configuraciones bipolar y unipolar respectivamente:
Su
principal ventaja con respecto a los servomotores tradicionales es su capacidad
para asegurar un posicionamiento simple y exacto. Pueden girar además de forma continua,
con velocidad variable, como motores síncronos, ser sincronizados entre sí,
obedecer a secuencias complejas de funcionamiento, etc. Se trata al mismo
tiempo de motores muy ligeros, fiables, y fáciles de controlar, pues al ser
cada estado de excitación del estator estable, el control se realiza en bucle
abierto, sin la necesidad de sensores de realimentación.
Motores de corriente alterna
Existen dos tipos fundamentales de motores de corriente alterna:
· Motores asíncronos de inducción
La frecuencia de la corriente alterna de la alimentación determina la velocidad a la cual rota el campo magnético del estator. El rotor sigue a este campo, girando más despacio.
· Motores síncronos
El inducido se sitúa en el rotor, que tiene polaridad constante (imanes permanentes o bobinas), mientras que el inductor situado en el estator, está formado por tres devanados iguales desfasados 120° eléctricos y se alimenta con un sistema trifásico de tensiones. Es preciso resaltar la similitud existente entre este esquema de funcionamiento y el del motor sin escobillas.
En los motores síncronos la velocidad de giro depende únicamente de la frecuencia de la tensión que alimenta el inducido. Para poder variar esta precisión, el control de velocidad se realiza mediante un convertidor de frecuencia. Para evitar el riesgo de pérdida de sincronismo se utiliza un sensor de posición continuo que detecta la posición del rotor y permite mantener en todo momento el ángulo que forman los campos del estator y rotor.
En la actualidad diversos robots industriales emplean este tipo de accionamientos con notables ventajas frente a los motores de corriente continua.
En el caso de los motores asíncronos, no se ha conseguido resolver satisfactoriamente los problemas de control que presentan. Esto ha hecho que hasta el momento no tengan aplicación en robótica.
No hay comentarios:
Publicar un comentario