Estructura
de un robot industrial

Un robot está formado por los siguientes
elementos: estructura mecánica, transmisiones, actuadores, sensores, elementos
terminales y controlador. Aunque los elementos empleados en los robots no son
exclusivos de estos (máquinas herramientas y otras muchas máquinas emplean
tecnologías semejantes), las altas prestaciones que se exigen a los robots han
motivado que en ellos se empleen elementos con características específicas.
La constitución física de la mayor parte de
los robots industriales guarda cierta similitud con la anatomía de las
extremidades superiores del cuerpo humano, por lo que, en ocasiones, para hacer
referencia a los distintos elementos que componen el robot, se usan términos
como cintura, hombro, brazo, codo, muñeca, etc.

Los elementos que forman parte de la
totalidad del robot son:
1.- La estructura - la estructura
mecánica (los eslabones, base, etc). Esto exige mucha masa, para proporcionar
la rigidez bastante estructural para asegurar la exactitud mínima bajo las
cargas útiles variadas.
2.- Actuadores -
Los motores, los cilindros, etc., las junturas del robot. Esto también podría
incluir los mecanismos para una transmisión, etc.,
3.- Control a la
Computadora - Esta computadora une con el usuario, y a su vez los mandos las
junturas del robot.
4.- El extremo de
Brazo que labora con herramienta (EOAT) - La programación que proporciona el
usuario se diseña para las tareas específicas.
5.- Enseñe la pendiente - Un método
popular para programar el robot. Esto es que una mano pequeña contiene un
dispositivo que puede dirigir movimiento del robot, los puntos de registro en
las sucesiones de movimiento, y comienza la repetición de sucesiones. Las
pendientes más prolongadas incluyen más funcionalidad.

Partes del brazo robot y periféricos
La unidad de control del brazo robot se
puede ampliar para poder interconectar mediante buses de comunicación o entras
y salidas a otros elementos y herramientas que comporten la célula de fabricación.

Estructuras mecánicas
Condicionadas por la naturaleza y
secuenciación de las articulaciones.
Cartesiana Cilíndrica

.jpg)
Polar Angular
.jpg)
.jpg)
Scara Paralelo
.jpg)
.jpg)
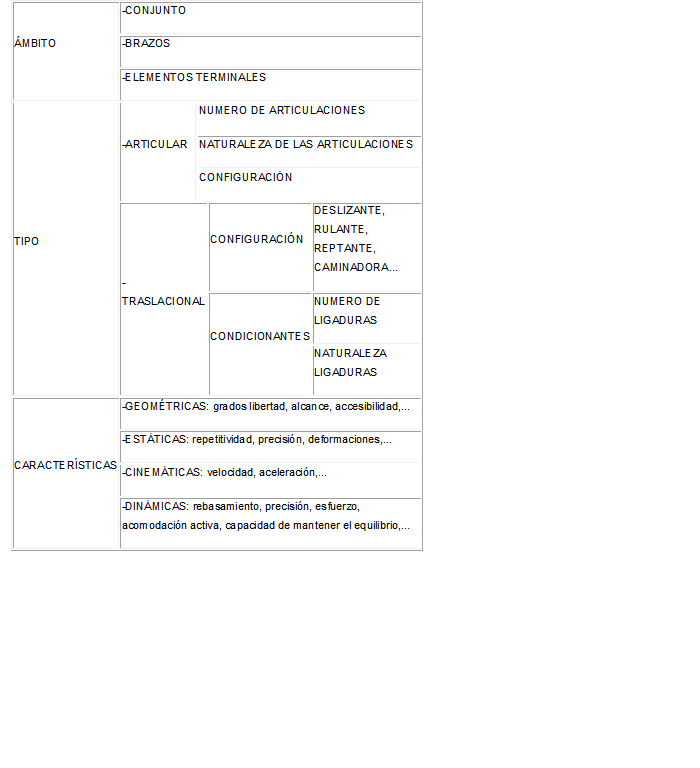
Características estructurales
• Numero de articulaciones
• Características geométricas y mecánicas de
los eslabones
• Emplazamiento de accionamientos
• Rigidez estructural
• Frecuencia de resonancia
• Rango articular
• Volumen de trabajo
• Accesibilidad
Movilidad
muy fuertemente
asociada a su morfología indica la capacidad de movimiento y las
características de su comportamiento dinámico. Puede referirse al conjunto
del robot o limitarse al ámbito de cualquier subsistema estructural del
robot (cuerpo, brazos o elementos terminales).
Hay cuatro tipos:

modo eje: Se trata de
mover cada eje del robot por separado. Intuyo que se trata del modo mas fácil de programar, pues es incrementar o decrementar el valor de dicho eje.



Como se implica un servomotor en el funcionamiento de la movilidad de los ejes de un robot.
Buen articulo, Gracias
ResponderEliminarEste comentario ha sido eliminado por el autor.
ResponderEliminar